EE, SDV, DVAI Grandes plateformes automobiles mondiales


- Détails
- Catégorie : Uncategorised
- Publication : mardi 9 juin 2026 08:13
- Écrit par Bensky
- Affichages : 202
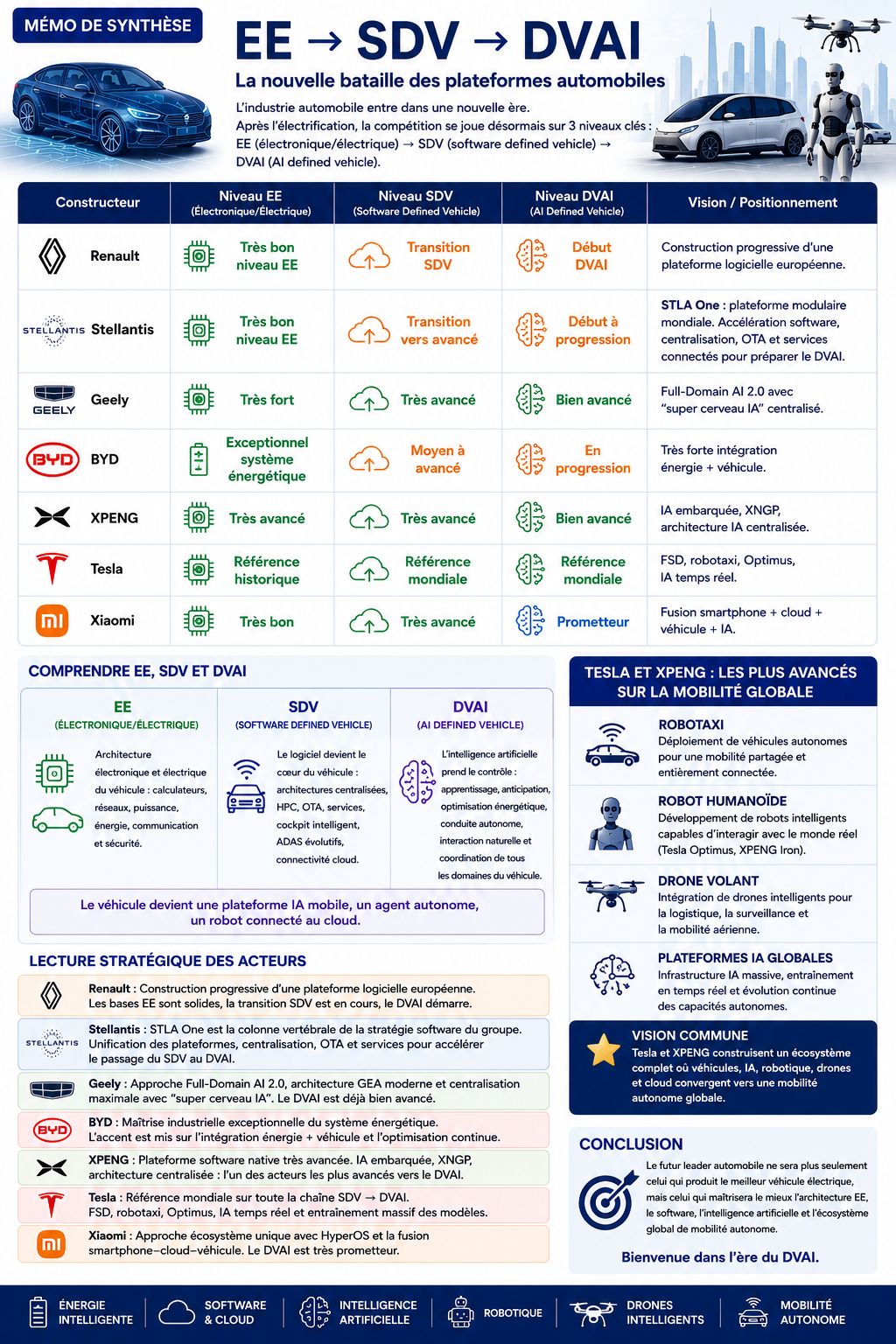
EE → SDV → DVAI : où en sont les grandes plateformes automobiles mondiales ?
L’industrie automobile mondiale entre dans une transformation majeure.
Après l’électrification, la nouvelle bataille technologique se joue désormais autour de trois niveaux stratégiques :
- EE (Electronic/Electrical Architecture)
- SDV (Software Defined Vehicle)
- DVAI (AI Defined Vehicle)
Le niveau EE représente l’architecture électronique du véhicule :
calculateurs, puissance, réseaux, sécurité, communication et gestion énergétique.
Le SDV introduit ensuite :
- les architectures centralisées,
- les HPC,
- les mises à jour OTA,
- les services logiciels,
- les cockpits intelligents,
- les ADAS évolutifs,
- la connectivité cloud.
Enfin, le DVAI ajoute une nouvelle dimension :
le véhicule devient piloté par une intelligence artificielle temps réel capable :
- d’apprendre,
- d’anticiper,
- d’optimiser l’énergie,
- de coordonner tous les domaines du véhicule,
- et d’évoluer vers une mobilité autonome globale.
Aujourd’hui, plusieurs constructeurs accélèrent fortement.
- Renault construit progressivement sa transition SDV avec Ampere et les futures architectures centralisées européennes. Le DVAI reste encore au stade de démarrage mais les bases technologiques se mettent en place.
- Stellantis avance désormais avec STLA One et sa nouvelle stratégie software mondiale. Le groupe cherche à unifier ses plateformes, accélérer les services connectés, les OTA et les architectures centralisées afin de renforcer sa transition SDV et préparer l’arrivée progressive du DVAI.
- Geely progresse très vite avec son architecture GEA et une approche “Full-Domain AI 2.0” intégrant un “super cerveau IA” centralisé. Leur logique système devient particulièrement avancée.
- BYD domine principalement l’intégration énergétique avec une maîtrise très forte de la batterie, du powertrain, de l’hybridation intelligente et de l’optimisation énergétique globale.
- XPENG fait partie des acteurs les plus avancés sur le SDV et le DVAI grâce à :
XNGP, l’IA embarquée, l’architecture centralisée et une approche software native très agressive.
- Tesla reste aujourd’hui la référence mondiale du DVAI avec :
FSD, robotaxi, Optimus, IA temps réel et entraînement massif des modèles IA.
- Xiaomi apporte une approche extrêmement moderne basée sur HyperOS et la fusion :
smartphone + cloud + véhicule + IA.
Ce qui devient particulièrement intéressant, c’est que Tesla et XPENG ne travaillent plus uniquement sur le véhicule.
Les deux entreprises accélèrent désormais sur :
- les robotaxis,
- les robots humanoïdes,
- les drones volants intelligents,
- les plateformes IA globales de mobilité.
Nous assistons désormais à une convergence complète entre :
automobile, IA, robotique, énergie et mobilité autonome.
Le futur leader mondial sera probablement celui qui maîtrisera le mieux :
- l’architecture EE,
- le software,
- l’intelligence artificielle,
- et l’écosystème global de mobilité autonome.